Sommaire
N'oubliez pas les fichiers h de la librairie.

|
c00a.c
|
/* ------------------------------------ */
/* save as : c00a.c */
/* ------------------------------------ */
#include "v_a.h"
#include "y_o.h"
/* ------------------------------------ */
double **triangle(double **U,double size);
/* ------------------------------------ */
int main(void)
{
double **U = GINIT(-200.,180.,-100.,310.);
F_mR(triangle(U,200.));
printf(" ... load \"a_main.plt\" ... with gnuplot.\n");
getchar();
return 0;
}
/* ------------------------------------ */
double **triangle(
double **U,
double size
)
{
int i=3;
if(size<10.) return(0);
for(;i--;)
{
GO(U,size/2.);TU(U,-120.);
triangle(U,size/2.);
TU(U,120.);GO(U,size/2.);
TU(U,120.);
}
return(U);
}
/* ------------------------------------ */
/* ------------------------------------ */
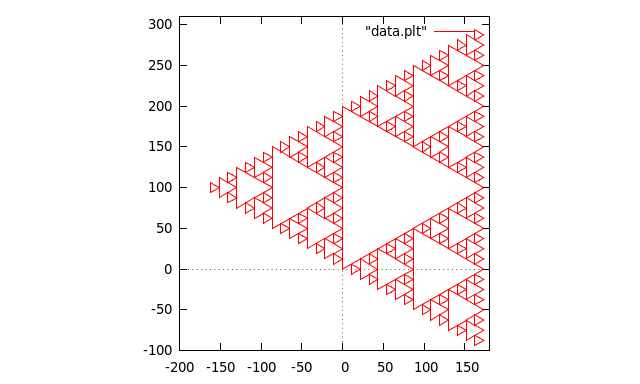
| Résultat dans gnuplot
|
|


